Enabling Seamless AMR Fleet Integration with a VDA 5050 Adapter
Client
OEM
Industry
How VDA 5050 Adapter Enables Seamless AMR Fleet Integration and Interoperability
Technologies
C++, ROS2 Middleware, MQTT, JSON, Ubuntu 20.04 LTS, Intel® Core™ Ultra 7/5 Processor, VDA 5050 v2.1.0
Business Need
The OEM’s AMR platform relied on proprietary commands for navigation and tasks, which limited interoperability with third party Fleet Management Systems (FMS) as well as with AMRs from other OEMs operating in the same facility. To target the European automotive and logistics markets where VDA 5050 compliance is increasingly mandated, the OEM required a standards compliant adapter that could bridge their internal APIs with the VDA 5050 protocol, ensuring smooth integration in mixed vendor fleets.
Description
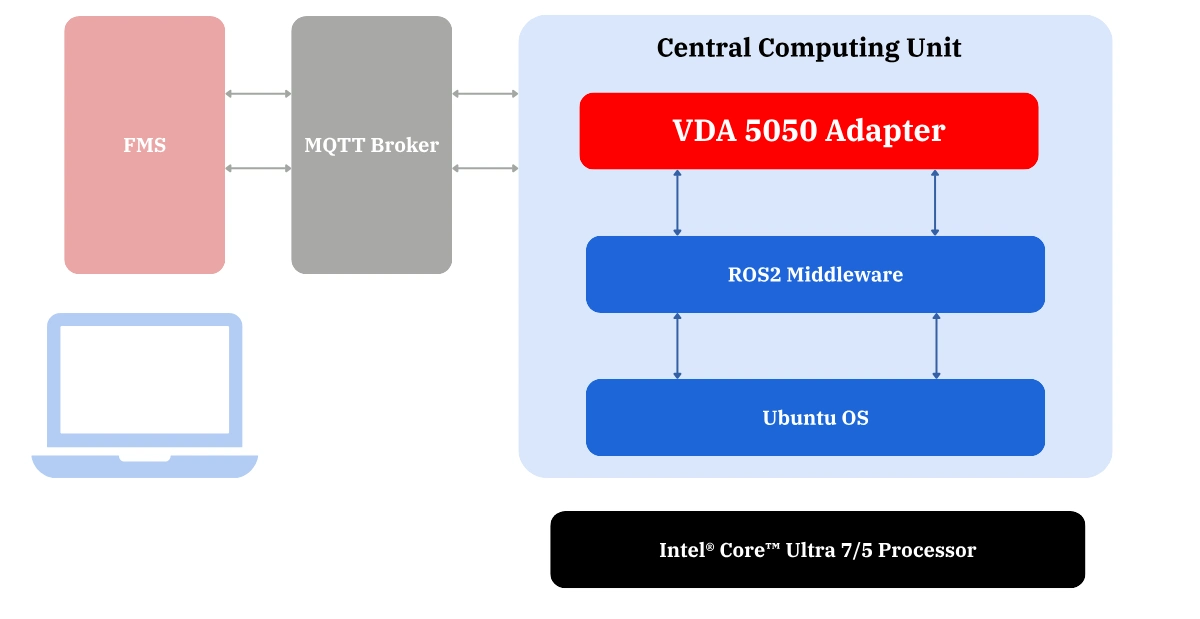
ElectRay built a ROS2-compatible VDA 5050 Adapter in C++, deployed on Advantech AFE-R360 hardware, enabling seamless translation between standardized fleet messages and the OEM’s proprietary APIs.
Challenge
Delivering VDA 5050 compliance required bridging standardized messages with low level robot logic while ensuring safe, real-time performance.
The implementation demanded solving key technical hurdles:
- Complex mapping: Translating VDA 5050 mission/state messages into low-level robot commands (navigation, lifting, battery updates, error codes).
- Real-time Performance: The adapter needed to operate with minimal latency to ensure the AMRs could respond to commands in real-time, crucial for safety-critical operations and traffic management.
- Error Handling and Recovery: A robust error-handling mechanism was required to manage mission failures, communication errors, and hardware faults. The adapter had to report these issues to the fleet manager accurately and initiate recovery procedures when possible.
Solution
A modular, high-performance adapter architecture was developed, fully aligned with VDA 5050 standards. It combined multi-threading, translation, and validation to ensure reliable, real-time, and scalable operations.
ElectRay designed a modular, high-performance adapter architecture, including:
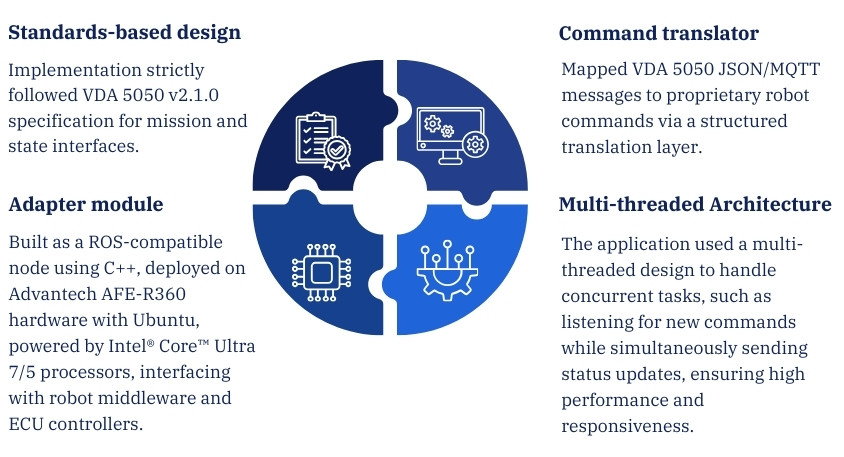
- Standards based design: Implementation strictly followed VDA 5050 v2.1.0 specification for mission and state interfaces.
- Adapter module: Built as a ROS-compatible node using C++, deployed on Advantech AFE-R360 hardware with Ubuntu, powered by Intel® Core™ Ultra 7/5 processors, interfacing with robot middleware and ECU controllers.
- Command translator: Mapped VDA 5050 JSON/MQTT messages to proprietary robot commands via a structured translation layer.
- Multi-threaded Architecture: The application used a multi-threaded design to handle concurrent tasks, such as listening for new commands while simultaneously sending status updates, ensuring high performance and responsiveness.